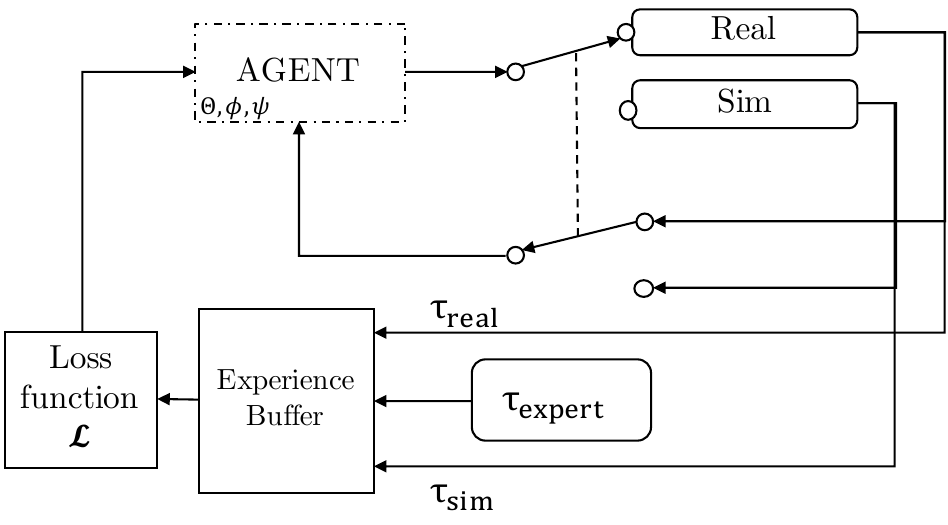
Inspired by Hausman et al. 2018 and Julian et al. 2018, which explored how an embedding space of trajectories can be exploited to reuse and interpolate task-specific knowledge in a multitask setting, this group project sought to optimize this framework by adding two components:
1) Initialize the embedding with expert demonstrations for each task to be learned to speed up exploration during training.
2) Shape the trajectory embedding with a Variational Autoencoder to provide a dense prior that can be more useful for interpolation.
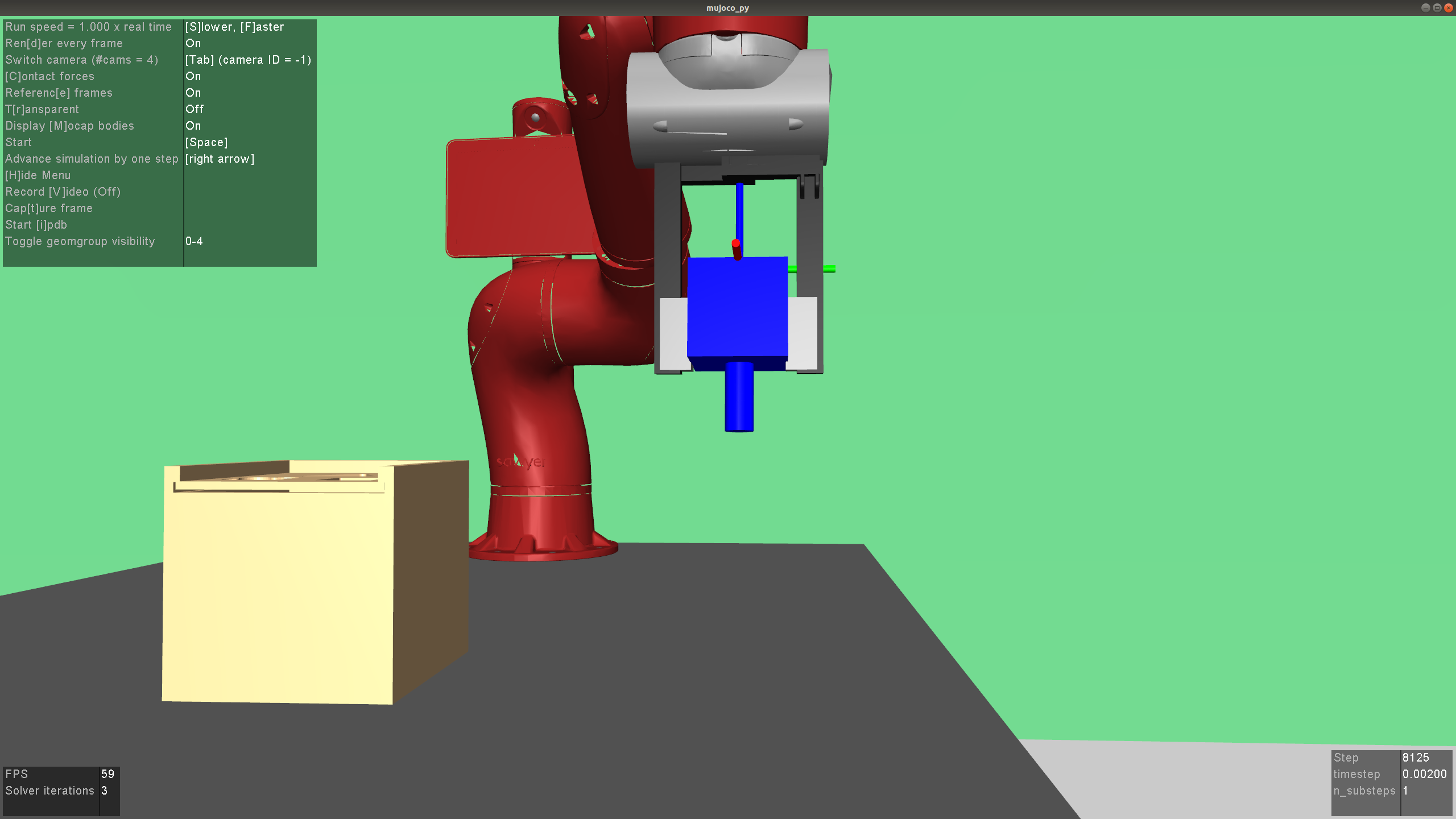
I developed an imitation learning algorithm in Tensorflow using the Garage toolkit, and built new multitask environments and expert datasets for testing.